
M
O
R
E
60秒早わかり解説
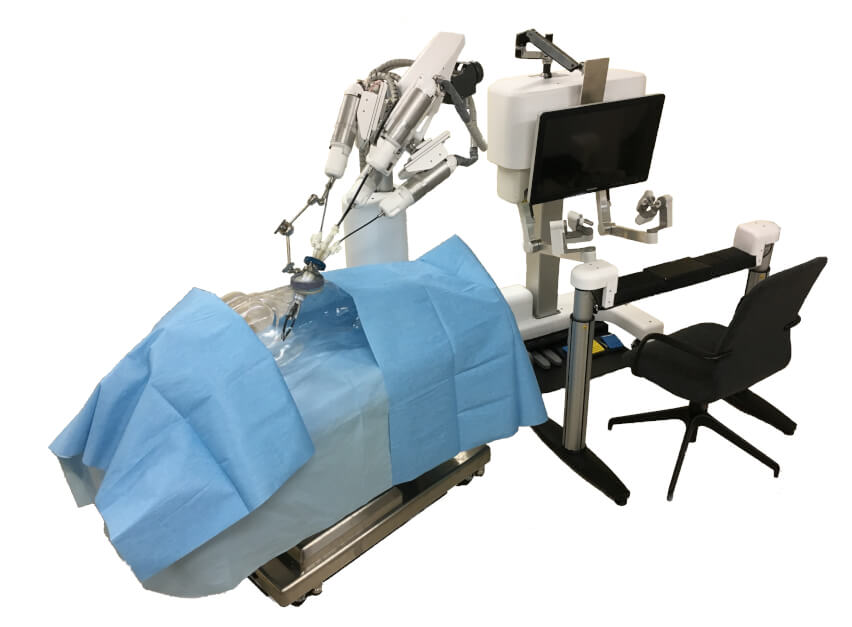
手術ロボットの例(AMED/慶應義塾大学外科他)
手術ロボットを利用した手術は、人間の手では不可能な操作が可能だ。その手術を行う消化器、整形外科、泌尿器科などの専門医と呼ばれる医師たちは多くの経験を積み、高い医療技術を有している。それ故に新しい医療機器への安心を求める声も多い。

手術ロボットの例(左:A-Traction、右:リバーフィールド)
手術ロボットと呼ばれる機器の特性として、操作している人間の意図と違う動きをしないという点がある。これにより医師は自分の手で直接手術しているような安心感をもてる。現在多くの国が開発にしのぎを削っているが、これまでは手術ロボットの安全性の基準は存在していなかった。
今般、日本からの提案に基づき中国、ドイツ、韓国、英国、米国などの専門家と調整を行い、2019年7月9日に国際標準(IEC 80601-2-77)が発行された。このIECには処置具の制御のほか、リスクを回避するための停止という考えも含まれている。今後多くの国で標準として採用されることにより、世界中の患者がロボット手術の恩恵を受けることが期待されている。
【関連情報先】













